


🎉 I started as a postdoctoral researcher at the GRASP Lab at UPenn.
I just started as a postdoctoral researcher at the GRASP Lab at the University of Pennsylvania, under the supervision of Prof. Kostas Daniilidis!
I am currently a postdoctoral researcher at the GRASP Lab, University of Pennsylvania, working on the intersection of computer vision, robotics and deep learning with and without event cameras. I am working under the supervision of Prof. Kostas Daniilidis and Prof. Pratik Chaudhari.
Ph.D. Computer Vision and Robotics
University of Zurich
MSc Mechanical Engineering
ETH Zurich
BSc Mechanical Engineering
ETH Zurich
I am a postdoctoral researcher at the GRASP Lab under the supervision of Prof. Kostas Daniilidis working on the intersection of computer vision, robotics and machine learning with and without event cameras.
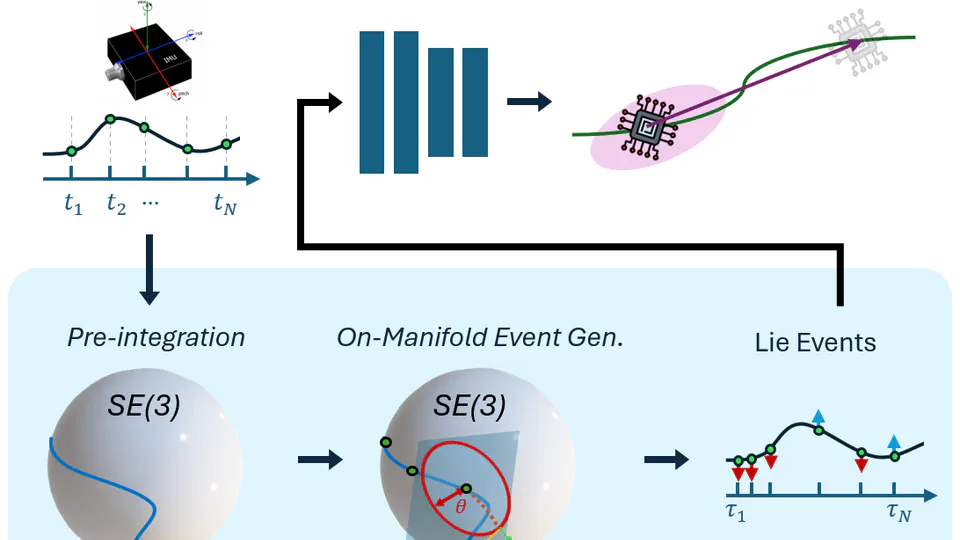
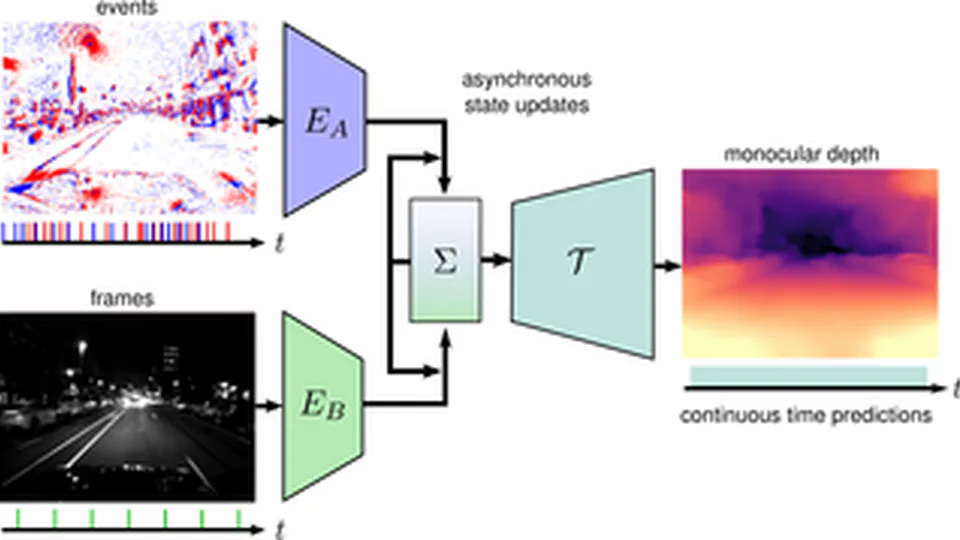
My research focuses on event-based sensing, and recently extended from vision-based (i.e., event cameras) to IMUs as part of my recent work on Lie Events for IMU-based navigation, and event-based computation in the embedding space via asynchronous neural networks. I plan to extend this framework to Predictive Event Tokenization (PET), generalizing event-based sensing to arbitrary sensors, learnable embedding spaces, and robotic systems. With PET, I aim to bring the benefits of asynchronicity and sparsity to these new domains.
Please reach out to collaborate!




I just started as a postdoctoral researcher at the GRASP Lab at the University of Pennsylvania, under the supervision of Prof. Kostas Daniilidis!
I successfully defended my Ph.D. thesis titled “Efficient, Data-driven Perception with Event Cameras”.