EKLT: Asynchronous, Photometric Feature Tracking using Events and Frames
Aug 22, 2019·
,
,
,
·
1 min read
Daniel Gehrig
Henri Rebecq
Guillermo Gallego
Davide Scaramuzza
Abstract
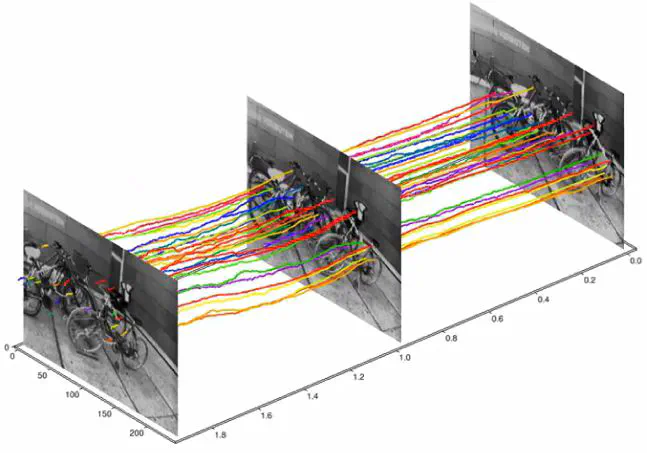
We present EKLT, a feature tracking method that leverages the complementarity of event cameras and standard cameras to track visual features with high temporal resolution. Event cameras are novel sensors that output pixel-level brightness changes, called “events”. They offer significant advantages over standard cameras, namely a very high dynamic range, no motion blur, and a latency in the order of microseconds. However, because the same scene pattern can produce different events depending on the motion direction, establishing event correspondences across time is challenging. By contrast, standard cameras provide intensity measurements (frames) that do not depend on motion direction. Our method extracts features on frames and subsequently tracks them asynchronously using events, thereby exploiting the best of both types of data: the frames provide a photometric representation that does not depend on motion direction and the events provide updates with high temporal resolution. In contrast to previous works, which are based on heuristics, this is the first principled method that uses intensity measurements directly, based on a generative event model within a maximum-likelihood framework. As a result, our method produces feature tracks that are more accurate than the state of the art, across a wide variety of scenes.
Type
Publication
Int. J. Comput. Vis. (IJCV)
This paper received an oral at ECCV 2018 and was invited as a journal extension at IJCV!