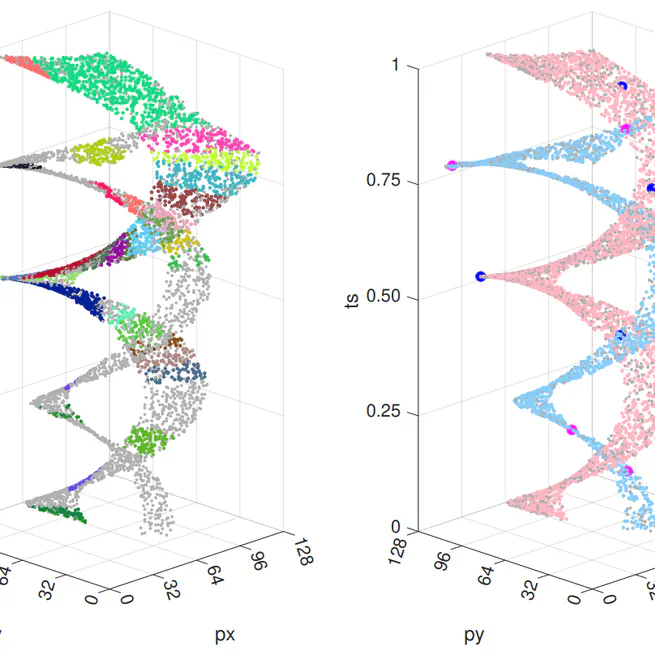
A 5-Point Minimal Solver for Event Camera Relative Motion Estimation
This paper lead to an oral at ICCV 2023 in Paris!
Oct 2, 2023
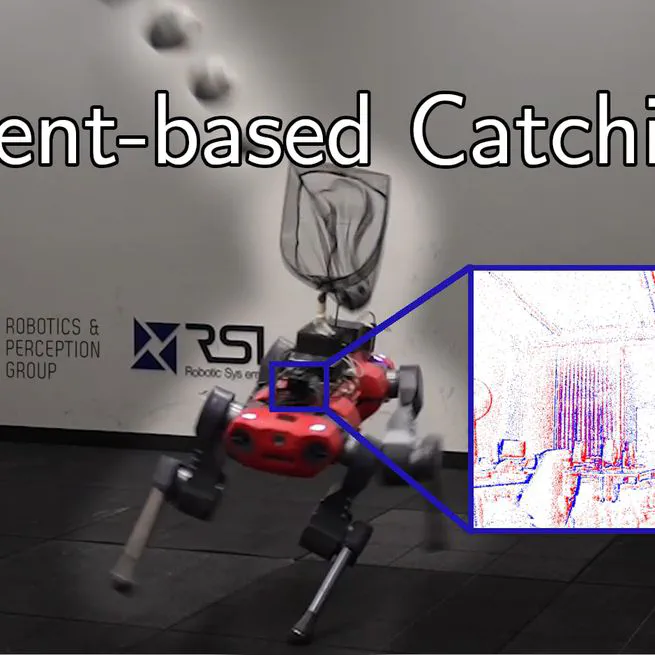
Event-based Agile Object Catching with a Quadrupedal Robot
Here we explore the advantages of using event cameras to catch high-speed objects at up 15 m/s with the quadrupedal robot ANYmal. Our paper “Event-based Agile Object Catching with a Quadrupedal Robot” was featured on IEEE Spectrum.
May 29, 2023
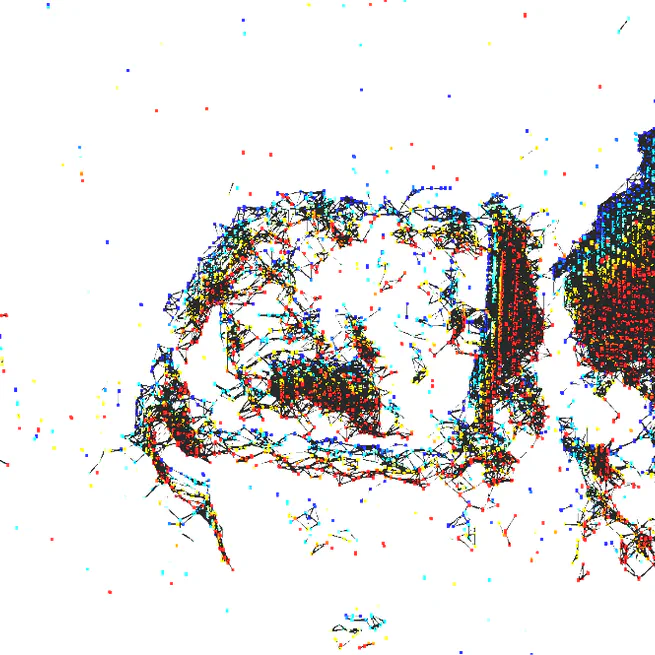
Pushing the Limits of Asynchronous Graph-based Object Detection with Event Cameras
Nov 20, 2022

Exploring Event Camera-based Odometry for Planetary Robots
Jul 1, 2022

Time Lens++: Event-based Frame Interpolation with Parametric Non-linear Flow and Multi-scale Fusion
This work appeared in , and lead to a patent with Huawei RC Zurich! Stepan Tulyakov, Alfredo Bocicchio, Stamatios Georgoulis, Yuanyou Li, Daniel Gehrig, Mathias Gehrig, and Davide Scaramuzza, IMAGE PROCESSING APPARATUS AND METHOD FOR GENERATING INTERPOLATED FRAME, WO/2023/083467, Pub- lished 19.
Jun 19, 2022
Multi-Bracket High Dynamic Range Imaging with Event Cameras
This paper lead to the following patent with Huawei RC Zurich! Stamatios Georgoulis, Nico Messikommer, Stepan Tulyakov, Julius Erbach, Alfredo Bochic- chio, Daniel Gehrig, Yuanyou Li, and Davide Scaramuzza, HIGH DYNAMIC RANGE IMAGING DEVICE AND METHOD OF GENERATING A HIGH DYNAMIC RANGE IMAGE, WO/2023/083466, Published 19.
Jun 19, 2022
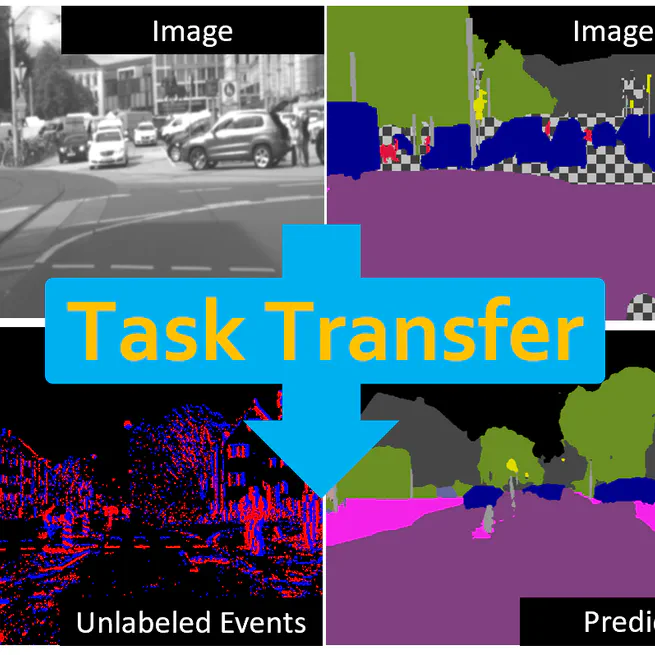
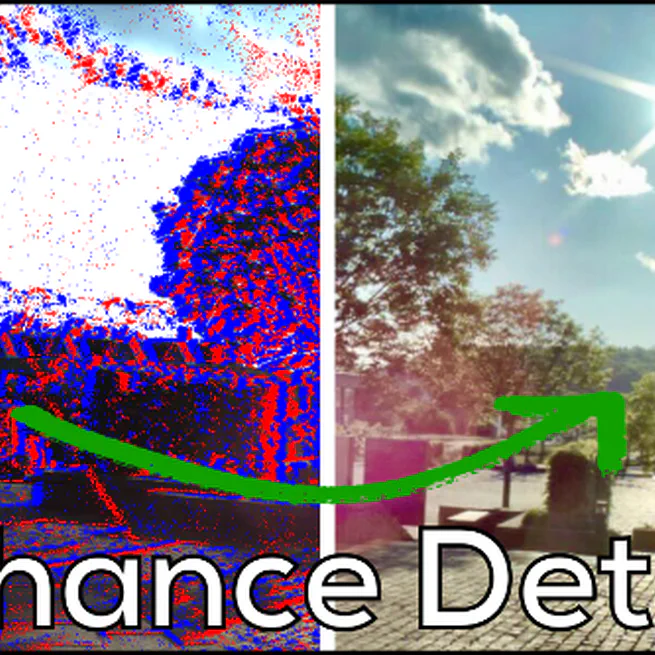
ESS: Learning Event-based Semantic Segmentation from Still Images
Jun 19, 2022

AEGNN: Asynchronous Event-based Graph Neural Networks
Jun 19, 2022
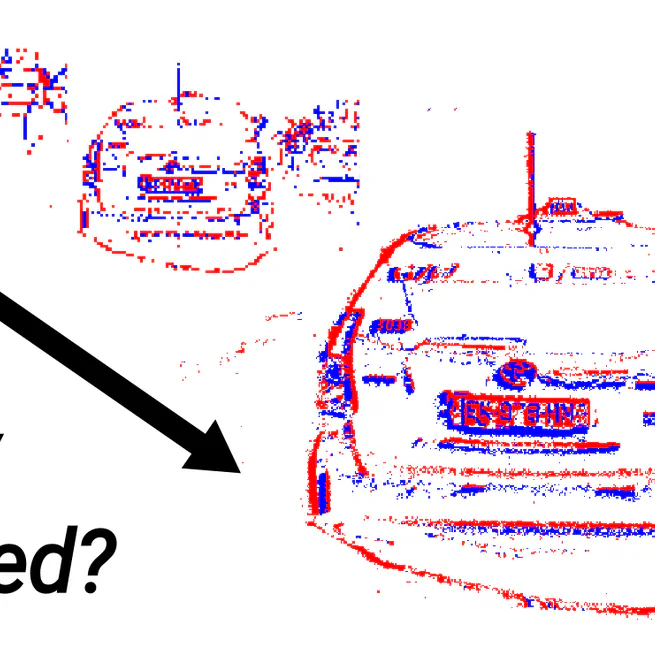
Are High-Resolution Event Cameras Really Needed?
Mar 28, 2022
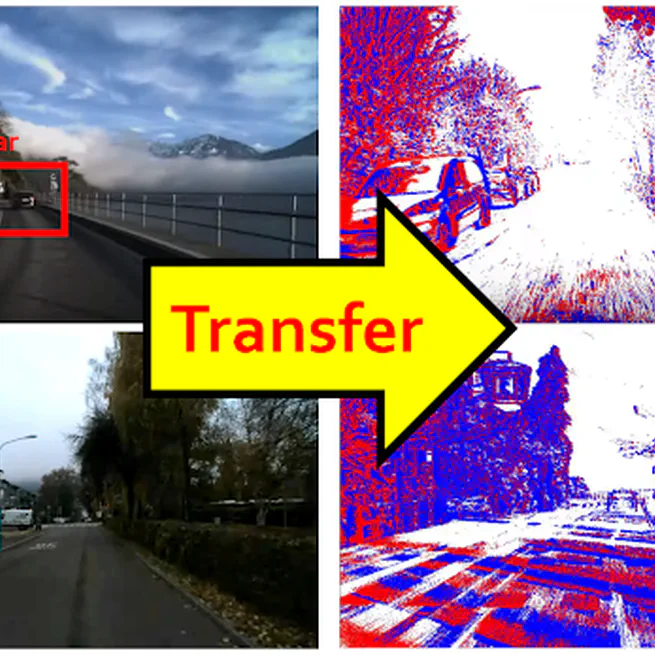
Bridging the Gap between Events and Frames through Unsupervised Domain Adaptation
Jan 25, 2022