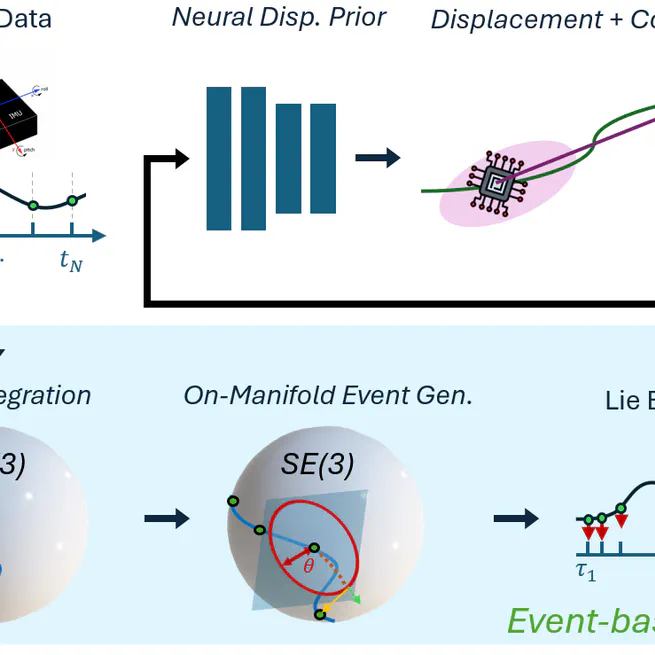
Neural Inertial Odometry from Lie Events
This work extended event-based sampling to IMU-based navigation opening the door to new event-based sensing paradigms!
Mar 20, 2025
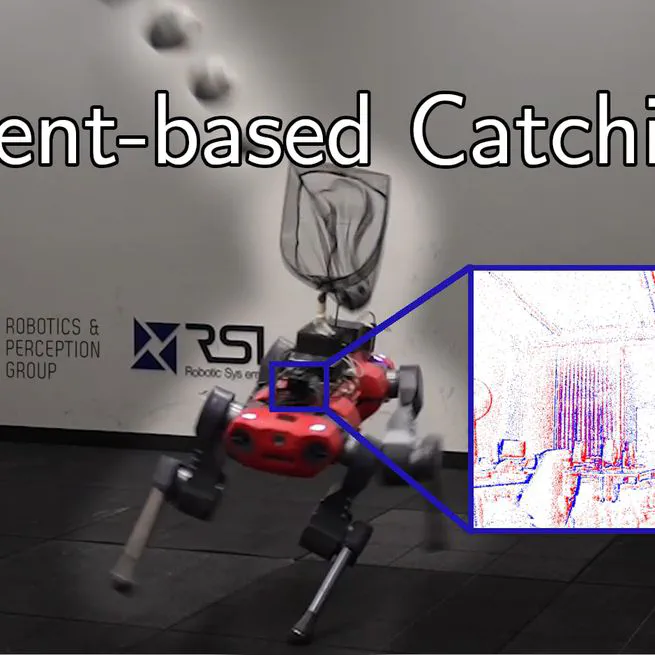
Event-based Agile Object Catching with a Quadrupedal Robot
Here we explore the advantages of using event cameras to catch high-speed objects at up 15 m/s with the quadrupedal robot ANYmal. Our paper “Event-based Agile Object Catching with a Quadrupedal Robot” was featured on IEEE Spectrum.
May 29, 2023

Exploring Event Camera-based Odometry for Planetary Robots
Jul 1, 2022
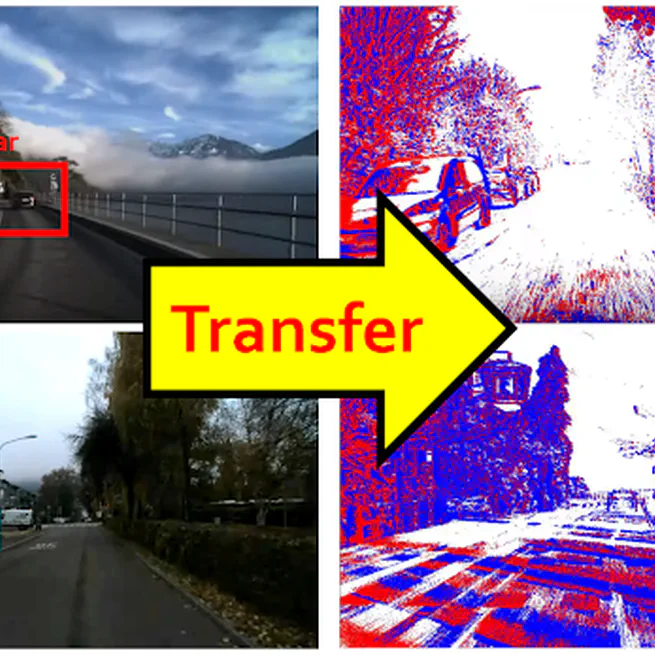
Bridging the Gap between Events and Frames through Unsupervised Domain Adaptation
Jan 25, 2022
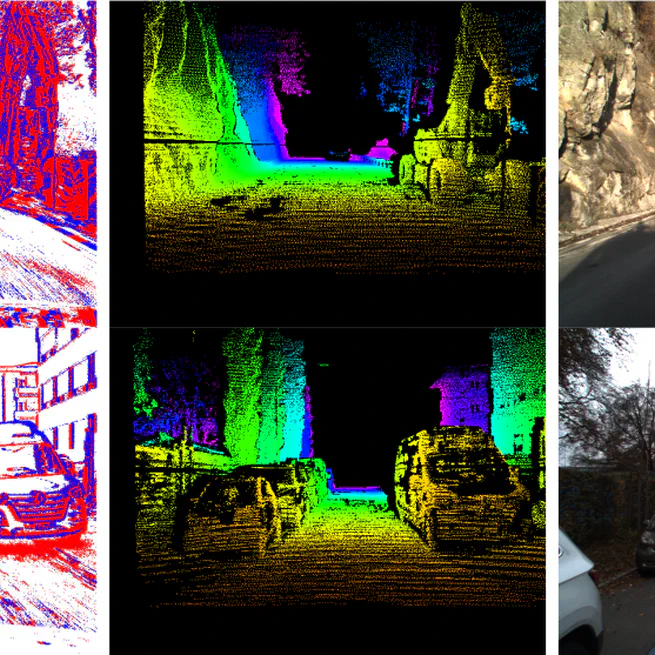
DSEC: A Stereo Event Camera Dataset for Driving Scenarios
May 30, 2021

Combining Events and Frames using Recurrent Asynchronous Multimodal Networks for Monocular Depth Prediction
The work by Michelle Rüegg that contributed to the paper “Combining Events and Frames using Recurrent Asynchronous Multimodal Networks for Monocular Depth Prediction”, presented at RA-L 2021 lead to the NCCR Swiss Robotics Master Award!
May 30, 2021
ESIM: an Open Event Camera Simulator
Oct 29, 2018

Guest Lecturer at "Real-World Robot Learning", University of Pennsylvania"
I gave the Guest Lecture "Learning from Internet Data" for the course "Real-World Robot Learning" at The University of Pennsylvania. The course covers vision and language foundation models with applications to robotics.
Dec 31, 1969